
This marks the final conference appearance for the CARPOS project.
At this year’s IEEE International Conference on Imaging Systems and Techniques (IST 2025), held in Strasbourg, France, the CARPOS research team had the opportunity to present one of the project’s most significant contributions:
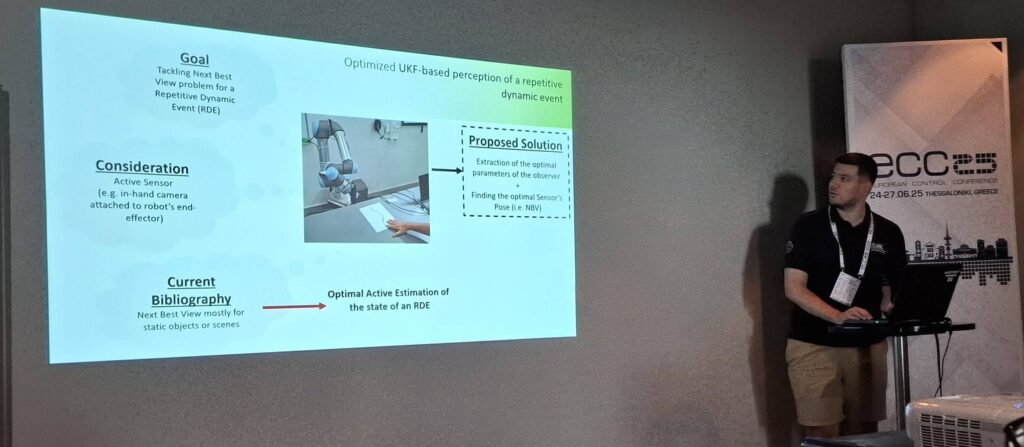
LAIF: Learning by Demonstration Through Active Incremental Data Fusion of Task Observations (by D. Papageorgiou, Nikos Efstathopoulos, yann angus and N. Kounalakis).
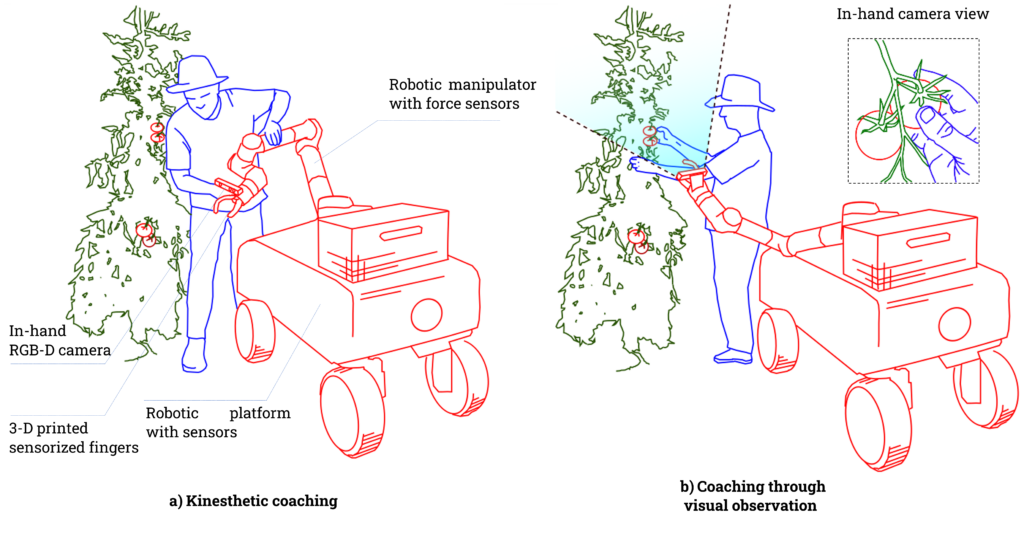
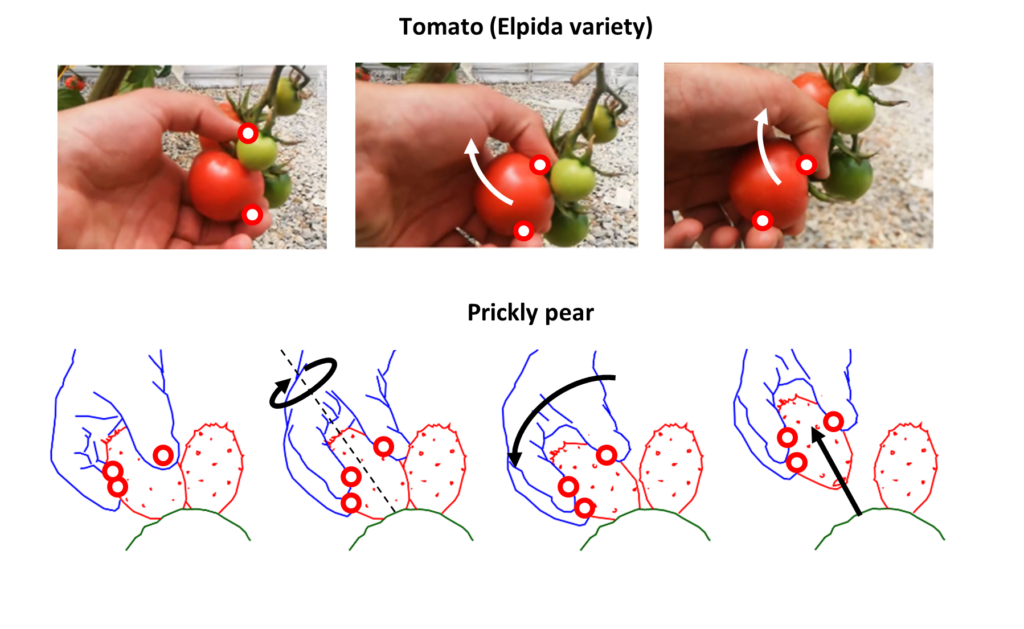
LAIF is a novel method for incrementally learning from human actions by actively observing them over multiple iterations.
We extend our thanks to George (Giorgio) Giakos for organizing such a great event and Denis CAVALLUCCI for graciously hosting it.
——
This research is funded by CARPOS project, carried out within the framework of the National Recovery and Resilience Plan Greece 2.0, funded by the European Union – NextGenerationEU (Implementation Body: HFRI). Project Number: 16523.